 嵌入式开发
嵌入式开发 电机编码器反馈:闭环控制系统实战详解
为什么需要闭环控制?
开环控制(比如直接用 PWM 驱动电机)有个致命问题:你不知道电机实际转了多少。负载变化、电压波动、摩擦力变化都会导致实际转速和位置偏离预期。
闭环控制通过编码器实时反馈电机实际状态,与目标值比较后动态调整输出,实现精准控制。这就是为什么 CNC 机床、机器人关节、云台相机都用闭环系统。
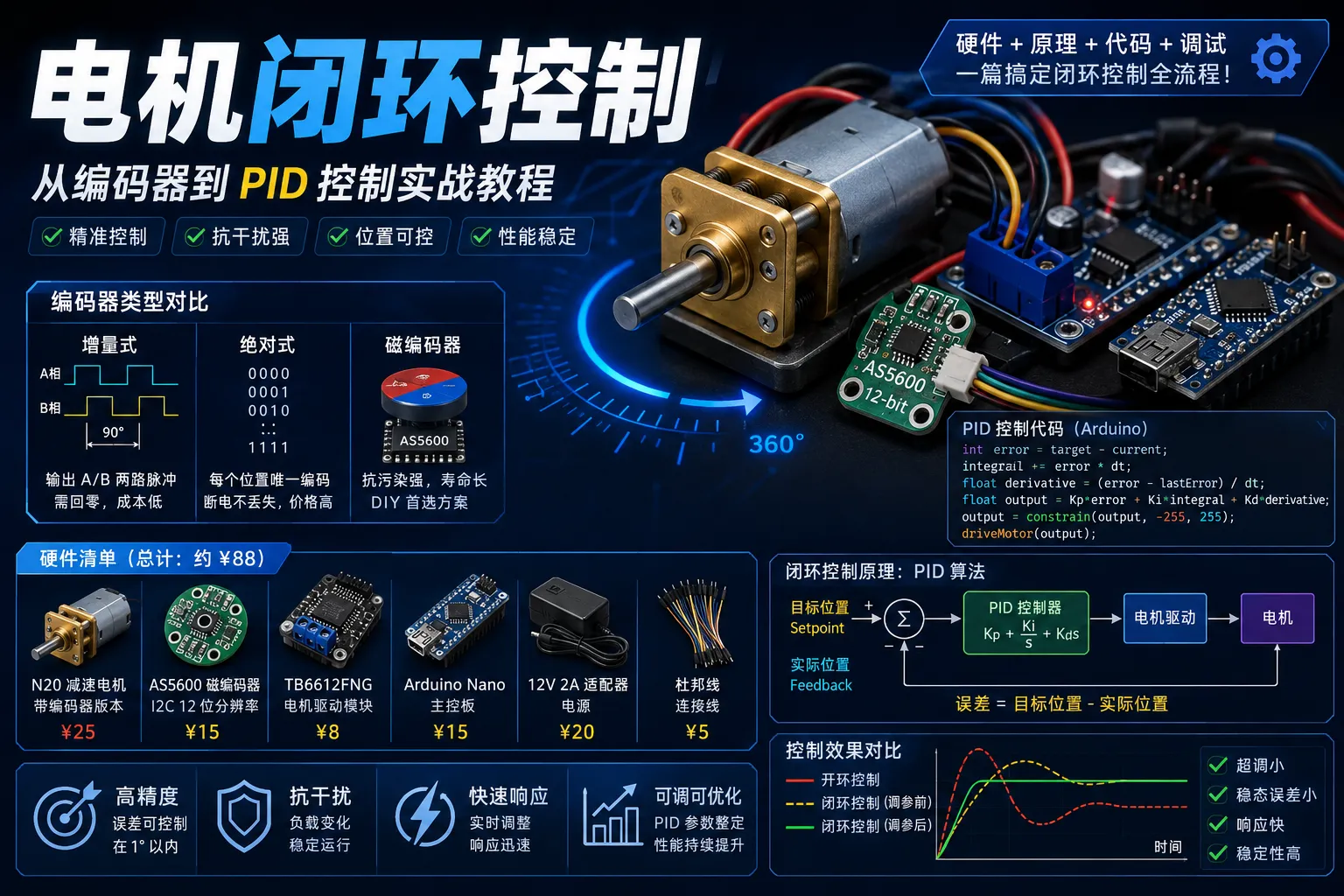
编码器类型详解
增量式编码器(Incremental Encoder)
最常见、最便宜。输出两路相位差 90° 的方波(A 相和 B 相),通过计数脉冲数计算转角,通过相位判断方向。
优点: 结构简单、成本低、响应快 缺点: 断电后丢失位置信息,需要回零操作
绝对式编码器(Absolute Encoder)
每个位置对应唯一的二进制编码,断电后位置不丢失。
优点: 无需回零、位置绝对准确 缺点: 价格高、接线复杂
磁编码器 vs 光编码器
| 类型 | 精度 | 成本 | 抗污染 | 典型分辨率 |
|---|---|---|---|---|
| 光电式 | 高 | 中 | 差 | 1000-5000 PPR |
| 磁电式 | 中 | 低 | 好 | 100-4096 PPR |
| 电容式 | 高 | 高 | 中 | 1000-10000 PPR |
DIY 项目推荐磁编码器(如 AS5600),便宜又耐造。
硬件清单
| 部件 | 型号 | 单价 | 数量 | 备注 |
|---|---|---|---|---|
| 直流电机 | N20 减速电机 | ¥25 | 1 | 带编码器版本 |
| 磁编码器 | AS5600 | ¥15 | 1 | I2C 接口,12 位分辨率 |
| 电机驱动 | TB6612FNG | ¥8 | 1 | 双路 H 桥,支持 PWM |
| 主控板 | Arduino Nano | ¥15 | 1 | 或 ESP32 |
| 电源 | 12V 2A 适配器 | ¥20 | 1 | 根据电机电压选择 |
| 杜邦线 | - | ¥5 | 1 包 | 连接线 |
总计:约¥88
AS5600 磁编码器接线
AS5600 支持 I2C 和模拟电压输出,这里用 I2C 模式:
| AS5600 | Arduino Nano |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | A5 (SCL) |
| SDA | A4 (SDA) |
| OUT | 悬空(I2C 模式不用) |
电机磁铁安装在电机轴上,AS5600 固定在距离磁铁 1-3mm 的位置。
闭环控制原理
闭环控制的核心是 PID 算法:
误差 = 目标位置 - 实际位置
输出 = Kp×误差 + Ki×误差积分 + Kd×误差微分-
P(比例): 误差越大,输出越大。但纯 P 控制会有稳态误差
-
I(积分): 累积历史误差,消除稳态误差。但过大会导致超调
-
D(微分): 预测误差变化趋势,抑制超调。对噪声敏感
完整代码示例
1. 读取编码器角度
#include
#include
AS5600 as5600;
void setup() {
Serial.begin(115200);
Wire.begin();
as5600.begin(Wire);
}
void loop() {
int angle = as5600.readAngle(); // 0-4095 (12 位)
float degrees = angle * 360.0 / 4096.0;
Serial.print(\"Angle: \");
Serial.print(angle);
Serial.print(\" (\");
Serial.print(degrees);
Serial.println(\"°)\");
delay(100);
}2. 完整闭环位置控制
#include
#include
// 编码器
AS5600 as5600;
// 电机驱动引脚
const int PWM_PIN = 9;
const int IN1_PIN = 7;
const int IN2_PIN = 8;
// PID 参数
float Kp = 2.0;
float Ki = 0.5;
float Kd = 1.0;
// 控制变量
int targetPosition = 0;
int currentPosition = 0;
float integral = 0;
float lastError = 0;
unsigned long lastTime = 0;
void setup() {
Serial.begin(115200);
Wire.begin();
as5600.begin(Wire);
pinMode(PWM_PIN, OUTPUT);
pinMode(IN1_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
// 初始化电机停止
analogWrite(PWM_PIN, 0);
}
void loop() {
// 读取目标位置(串口输入)
if (Serial.available()) {
targetPosition = Serial.parseInt();
integral = 0; // 重置积分
lastError = 0;
Serial.print(\"Target: \");
Serial.println(targetPosition);
}
// 读取当前位置
currentPosition = as5600.readAngle();
// PID 计算
int error = targetPosition - currentPosition;
unsigned long currentTime = millis();
float dt = (currentTime - lastTime) / 1000.0; // 秒
if (dt > 0) {
integral += error * dt;
float derivative = (error - lastError) / dt;
float output = Kp * error + Ki * integral + Kd * derivative;
// 限制输出范围
output = constrain(output, -255, 255);
// 驱动电机
driveMotor(output);
lastError = error;
lastTime = currentTime;
}
// 调试输出
Serial.print(\"Pos: \");
Serial.print(currentPosition);
Serial.print(\" Err: \");
Serial.print(error);
Serial.print(\" Out: \");
Serial.println((int)output);
delay(10); // 100Hz 控制频率
}
void driveMotor(float pwm) {
if (pwm > 0) {
digitalWrite(IN1_PIN, HIGH);
digitalWrite(IN2_PIN, LOW);
analogWrite(PWM_PIN, pwm);
} else if (pwm 2048) delta -= 4096;
if (delta 50) {
output = (output > 0) ? 20 : -20;
}实际应用场景
-
云台相机: 保持相机稳定,抵消手部抖动
-
机器人关节: 精准控制机械臂角度
-
平衡车: 实时调整电机保持平衡
-
CNC 进给轴: 精确控制刀具位置
-
卷扬机: 恒张力控制
总结
闭环控制是电机控制的进阶技能,核心在于:
-
$1
-
$1
-
$1
从开环到闭环,你的项目会从”能动”升级到”精准可控”。
希望这篇博客文章对您有所帮助!